1 汽车定位技术概述
按原理不同,汽车定位技术可分为以下三类:
- GNSS(Global Navigation Satellite System)全球导航卫星系统,比如GPS、BDS。
- 导航递推。利用IMU等车载传感器和之前时刻汽车位姿推算当前时刻位姿。
- 地图匹配。使用LiDAR或者Camera采集到的数据特征和高精地图进行匹配,得到位姿。
2 时间与坐标系
2.1 常用时间
2.1.1 世界时(Universal Time, UT)
基于地球转动的时间计量方式,不是均匀流过,由于地球自转逐渐变慢,世界时的流速也在变慢
2.1.2 原子时(International Atomic Time, TAI)
基于原子钟(原子能级跃迁有极高稳定性),均匀流过, 1958年1月1日创立;
2.1.3 协调世界时(Universal Time Coordinate , UTC)
由于世界时的流动变慢,而原子时均匀流过,那么原子时的领先量就会逐渐增加,当原子时领先世界时达到0.9s时,就让原子时等待1s,具体做法则是闰秒机制,调整后的原子时为协调世界时。
2.1.4 GPS时
时间基础是1980年1月6日0点的协调时,落后原子时19s。目前比UTC时间快18秒。
2.1.5 北斗时
北斗时始于2006年1月1日0点0分0秒。北斗周和GPS周相差1356周,北斗秒和GPS秒相差14秒,比UTC时间快4秒。
在使用GNSS卫星接收机时间时,用户需要注意使用的是哪个时间和对应的含义和基准。
2.2 常用坐标系
2.2.1 地心地固大地坐标系
原点在地球质心,跟随地球转动,以参考椭球面为基准面建立起来的坐标系,最常使用的为WGS84椭球体,GPS输出的位置信息即是WGS84的经纬高坐标系。
2.2.2 地理坐标系/当地水平坐标系
可以认为是地球椭球体在某点切平面上建立起来的空间直角坐标系,一般取东北天为XYZ,GNSS输出的东北天速度即是该坐标系下的表达。
2.2.3 车体坐标系
一般取车辆后轴中心为原点,建立空间直角坐标系,右前上或前左上为XYZ轴。
2.2.4 起始参考坐标系
某些场景下(如地库泊车),没有全局GNSS信号接入,此时也并不关心全局定位,只需确定某个固定不变的坐标系,定位出车辆在该坐标系下的坐标即可,此时可以将定位模块初始化时的位置定为原点(0,0,0),三个姿态角也都置0处理,之后进行位姿的递推估计。
3 GNSS
3.1 定位原理
在地面上某点接收卫星信号,信号中包含信号发出时卫星的位置和时间,根据时间差和光速便可以算出与卫星的距离。如果同时知道三个卫星的位置及到它们的距离,那么分别以三个卫星为球心,与其距离为半径的三个球面将相交于两点。考虑到我们是在地球表面,再加上地球,四个球面将相交于一点,这就是我们自身的位置。因此,只需三颗卫星即可实现定位。
然而,接收机和卫星之间之间的时间难以严格同步。卫星钟差可以用导航电文中所给的有关钟差参数进行修正,但接收机的钟差大多难以精准确定。通常的做法是将接收机钟差也作为一个未知参数,与接收机的坐标一并求解。多了一个变量,需要更多信息去求解。所示实际上通常需要四颗卫星进行定位。
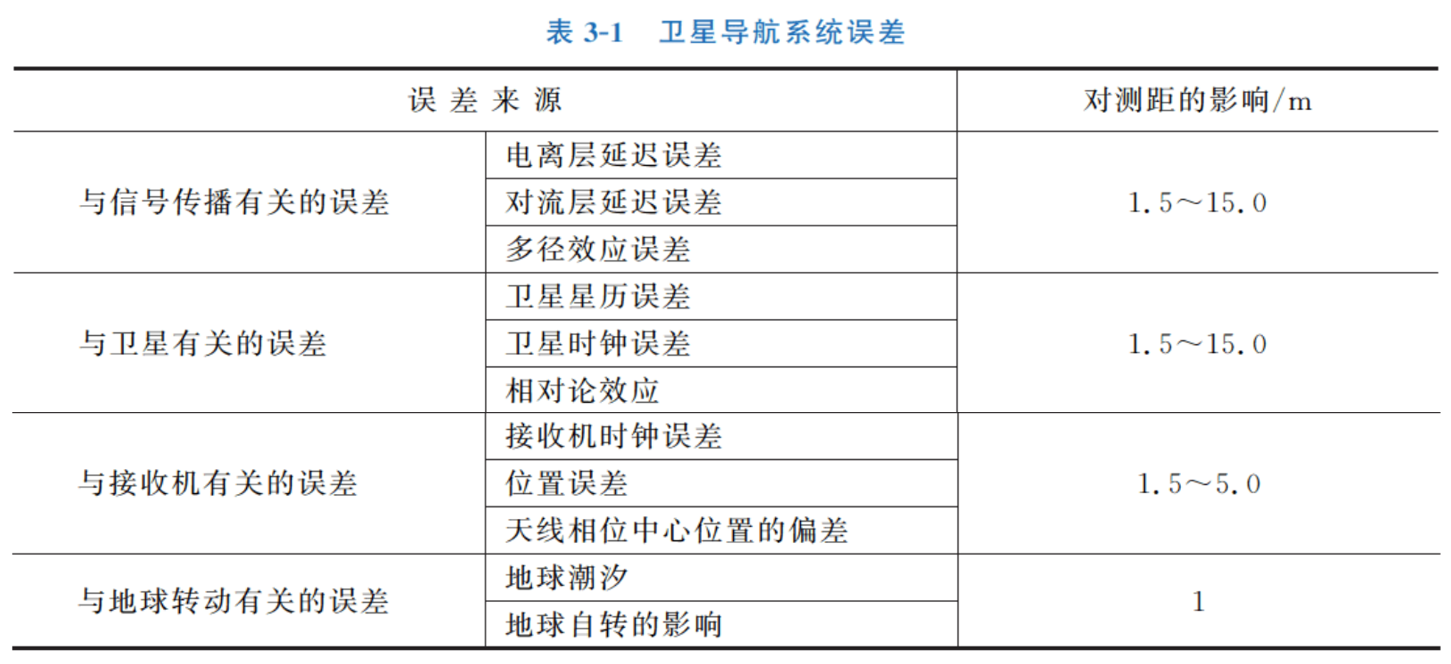
3.2 GNSS 数据误差
3.3 差分 GNSS
设置一个已知精确位置的基准站,基准站根据卫星信号计算出位置,与其实际位置进行比较,可以得到差分校正量。然后基准站将此差分校正量分发到期范围内的流动站进行数据修正。这种方式可以减少甚至消除卫星时钟、卫星星历、电离层延迟和对流层延迟所引起的误差,提高定位精度。
流动站与差分基准站越近,两战点间的测量误差就越相似,差分 GNSS 系统性能就越好。
差分 GNSS 又分为位置差分、伪距差分和载波相位差分(RTK)。
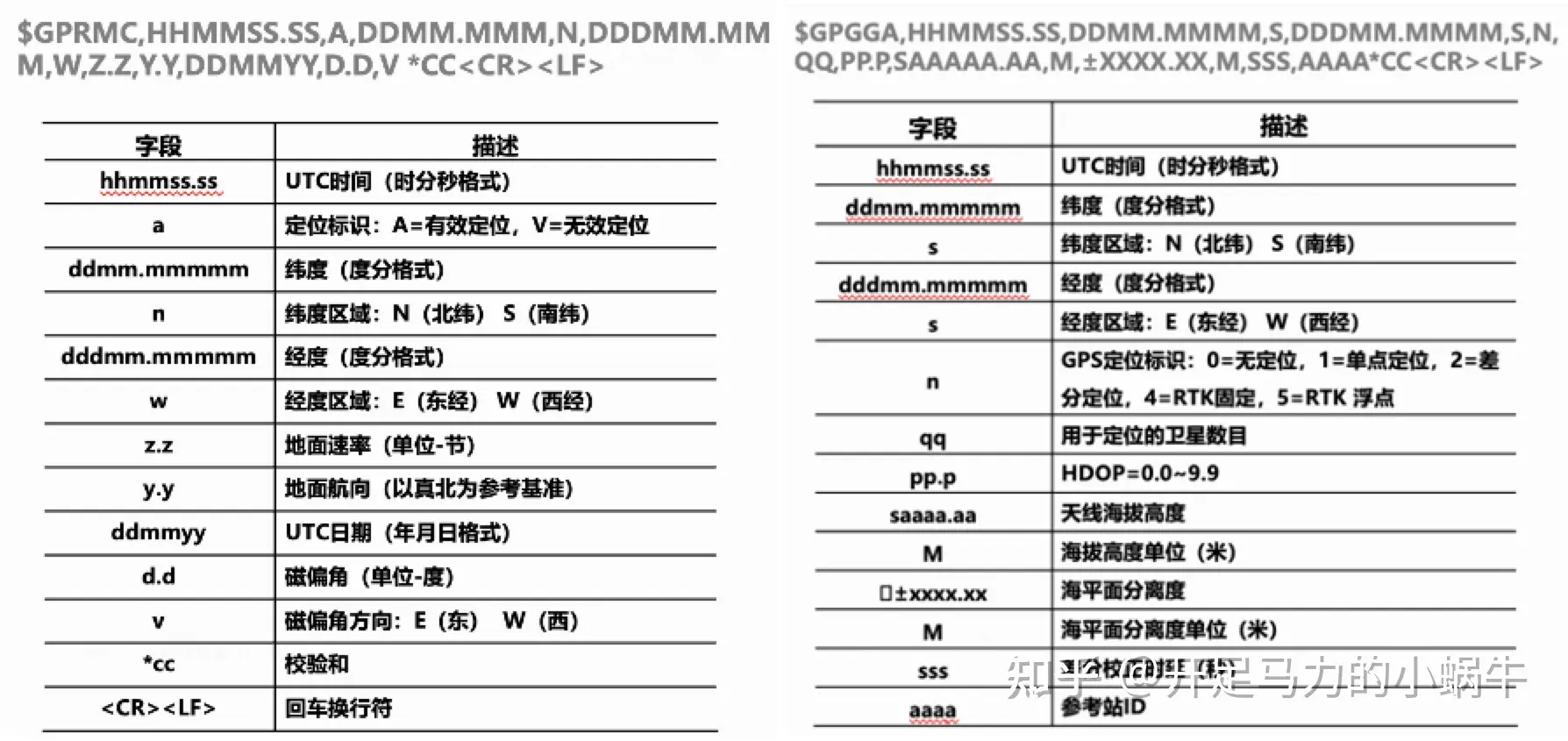
3.4 GNSS 输出语句标准
美国国家海洋电子协会NMEA-0183协议是目前GNSS接收机上使用最广泛的协议,大多数常见的GNSS接收机、GNSS数据处理软件、导航软件都遵守或者至少兼容这个协议。协议中一共定义了7条标准语句。分别是GPGGA、GPGSA、GPGSV、GPRMC、GPVTG、GPGLL、GPZDA。这当中最常用的两条语句要属GPGGA和GPRMC。
4 惯性导航与轮速记
惯性导航系统(Inertial Navigation System, INS)既不依赖外部信息,也不向外辐射能量。其基于牛顿第三定律和角动量守恒原理进行位姿递推。常见的惯性测量单元(IMU)包括三个相互正交的单轴加速度计和三个相互正交的单轴陀螺仪。
轮速编码器也称轮速计,其测量原理是敏感转动信号,转动量通过脉冲数字的方式进行记录。根据轮胎半径和一个整圈脉冲字累计数量,可以换算出每个脉冲字变化对应的距离。对时间微分可以换算成车速。
5 地图匹配定位技术
参考 视觉slam 笔记
6 几种方式对比

7 多传感器融合
GNSS 更新频率低,不能满足自动驾驶中实时性要求,且定位信号会因隧道、建筑群等障碍物的遮挡而中断。INS频率高,一定时间内可以提供连续的较高精度的位置、速度和航向信息,但误差会随着时间累积而剧增。将二者结合,可以利用GNSS提供的定位来纠正INS的累计定位误差,同时INS可以解决GNSS容易受场景影响的问题,可以得到实时和精准的定位。如果再与地图匹配技术相结合,可以进一步提高定位精度。实际应用中大多使用多传感器融合后的结果。
8 参考资料
-
《自动驾驶-汽车定位技术》
本文由 晓楼 创作,采用 知识共享署名4.0 国际许可协议进行许可。本站文章除注明转载/出处外,均为本站原创或翻译,转载前注明出处